 GDU
GDU
 UUUFLY
UUUFLY DJI
DJI MMC
MMC GDU
GDU XAG
XAG AOLAN
AOLAN KØL
KØL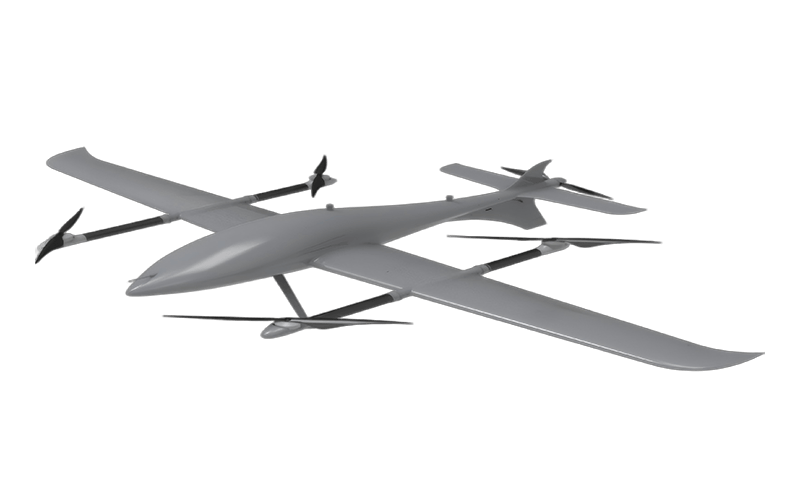 SKY NÆSTE
SKY NÆSTE
Dragonfish Standard: Næste generations multimission eVTOL
Dragonfish Standard Alsidig Multi-Mission eVTOL UAV
Balanceret udholdenhed, fleksibilitet i nyttelast og hurtig implementering til industrielle og offentlige sikkerhedsapplikationer

Dragonfish Standard Alsidig Multi-Mission eVTOL UAV
Balanceret udholdenhed, fleksibilitet i nyttelast og hurtig implementering til industrielle og offentlige sikkerhedsapplikationer
Stille flyvning
Dragonfish opnår ultralydsflyvning takket være sit exceptionelle fremdriftssystem og innovative støjreducerende design. Den er næsten ikke hørbar over 400 ft (120 m) AGL*, hvor DF reducerer risikoen for opdagelse betydeligt, samtidig med at den sikrer operationel hemmeligholdelse.
Lær mere >>

Stille flyvning
Dragonfish opnår ultralydsflyvning takket være sit exceptionelle fremdriftssystem og innovative støjreducerende design. Den er næsten ikke hørbar over 400 ft (120 m) AGL*, hvor DF reducerer risikoen for opdagelse betydeligt, samtidig med at den sikrer operationel hemmeligholdelse.
Lær mere >>
Overlegen anti-interferens
I komplekse miljøer opretholder dronen enestående kommunikations- og videotransmissionsydelse med stærke anti-interferensfunktioner og stabil og pålidelig transmission.

Overlegen anti-interferens
I komplekse miljøer opretholder dronen enestående kommunikations- og videotransmissionsydelse med stærke anti-interferensfunktioner og stabil og pålidelig transmission.
Hvorfor professionelle vælger Dragonfish Standard?

GNSS-tabsbeskyttelse
Når dronen opererer i ikke-GNSS-miljøer, aktiverer den landingsbeskyttelsen og lander automatisk fra sin aktuelle position for at sikre sikkerheden.
Lav batterilevetid
Brugere kan tilpasse det forventede batteriniveau ved landing. Dronen beregner det optimale returtidspunkt i realtid baseret på aktuelle batteriniveauer og flystatus, hvilket sikrer, at den lander med et batteriniveau tæt på den brugerdefinerede tærskel.
Retur af mistet signal
Hvis signalet mellem dronen og jordstationen afbrydes, aktiveres beskyttelsen mod forbindelsesbrud. Hvis GNSS-signaler er tilgængelige, initierer dronen automatisk tilbagevenden til hjemlandet.
Manuel nødoverstyring
I tilfælde af en nødsituation kan du til enhver tid skifte fjernbetjeningen til M-tilstand for øjeblikkeligt at tage manuel kontrol og dermed sikre flysikkerheden.

Flere afskedigelser, der sikrer missionssikkerhed
eVTOL har redundans på flere niveauer på tværs af nøglekomponenter (batterier, sensorer, kommunikationsbusser) og autonom tilstandsskift, hvilket sikrer stabil flyvning og pålidelig ydeevne selv i komplekse miljøer.
Selvtjek med ét tryk
Udfører automatisk et systemtjek før start, hvilket sikrer, at hver flyvning er sikker og pålidelig.
Retur med én knap
Nem tilbagevenden til hjemmet via Hjem-knappen. Praktisk opbevaring: Hurtig organisering efter flyvning, nem at opbevare og klar til næste brug.
Intelligent sporing
Dronen kan låse sig fast på sine mål og fleksibelt justere sin flyvebane. Understøtter flere sporingstilstande.

Start og landing på mobil platform
Understøtter start og landing på bevægelige platforme.
Specifikationer for Dragonfish Dragonfish Standard
| Specifikation | Detaljer |
| Type | Tilt-Rotor Multi-Mission eVTOL UAV |
| Dimensioner | 1948 × 3295 × 520 mm (inklusive propeller) |
| Vægt | 7,5 kg (inkl. 2 batterier, propeller; ekskl. gimbal-nyttelast) |
| Maksimal nyttelastkapacitet | 1,5 kg |
| Maksimal flyvetid | 126 minutter (med standard nyttelastkonfiguration) |
| Maksimal horisontal hastighed | 120 km/t |
| Maksimal horisontal hastighed | 126 km/t (35 m/s) |
| Maksimal vindmodstand | 15 m/s (fastvinget tilstand), 12 m/s (vertikal flyvetilstand) |
| Maks. serviceloft | 5000 m over havets overflade |
| Driftstemperatur | -20°C til 50°C |
| IP-klassificering | IP43 |
| GNSS-understøttelse | GPS + GLONASS + BeiDou + Galileo (positionering i flere konstellationer) |
| Maks. signaltransmissionsområde | 30 km |
| Implementeringstid | ≤5 minutter (værktøjsfri hurtigudløsermontering) |
Størrelsessammenligning

Tilbehør

Dragonfish Jordstation

Autel Smart Antenne Transmission (ASAT) (valgfrit)

Autel Dragonfish Nest (valgfrit)

Dragonfish Repeater (valgfrit)
Tilpasningsprodukt

Kystbekæmpelse af menneskesmugling

Politihåndhævelse

Forebyggelse af skovbrande

Inspektion af strømledninger

Trafikinspektion




